冰川表面产生的融水大部分通过冰川裂隙和冰川竖井流向冰川底部,进而经冰下排水系统(简称“冰下水系”)流向冰川末端。在这个系统中,水压调节冰-岩界面的耦合,决定冰川的滑移速度。因此,水压对冰川和冰盖的稳定性及其对海平面上升的贡献有重大影响。冰下水压与融水在冰川下的流动路径有着复杂的关系,主要取决于水是流经冰下空洞主导(Cavity-dominated)、分散且低效的排水系统(Lliboutry et al., 1983)还是通道主导(Channel-dominated)、集中且高效的排水系统(Rothlisberger et al., 1972)。以冰下空洞为主的排水系统可能与高水压有关,通过减少冰-岩界面的耦合,促进冰川快速滑动,而通道主导的排水系统的演化可能会伴随着相对较低的水压,这促使冰川滑动速度降低。
目前对冰下排水系统的观测通常是点尺度的 (如冰川钻孔)或空间累积的 (如染料示踪实验或水化学分析),它们只能提供冰下排水系统不均匀性的部分特征。为了克服稀疏观测所带来的数据不足,近期,法国国家科学研究中心的Nanni等人,利用密集地震阵列方法结合创新的震源定位技术,在d'Argentière冰川上开展了为期一个月的观测,用于冰川下水文学研究(如图1)。该研究成果近期发表于PNAS。
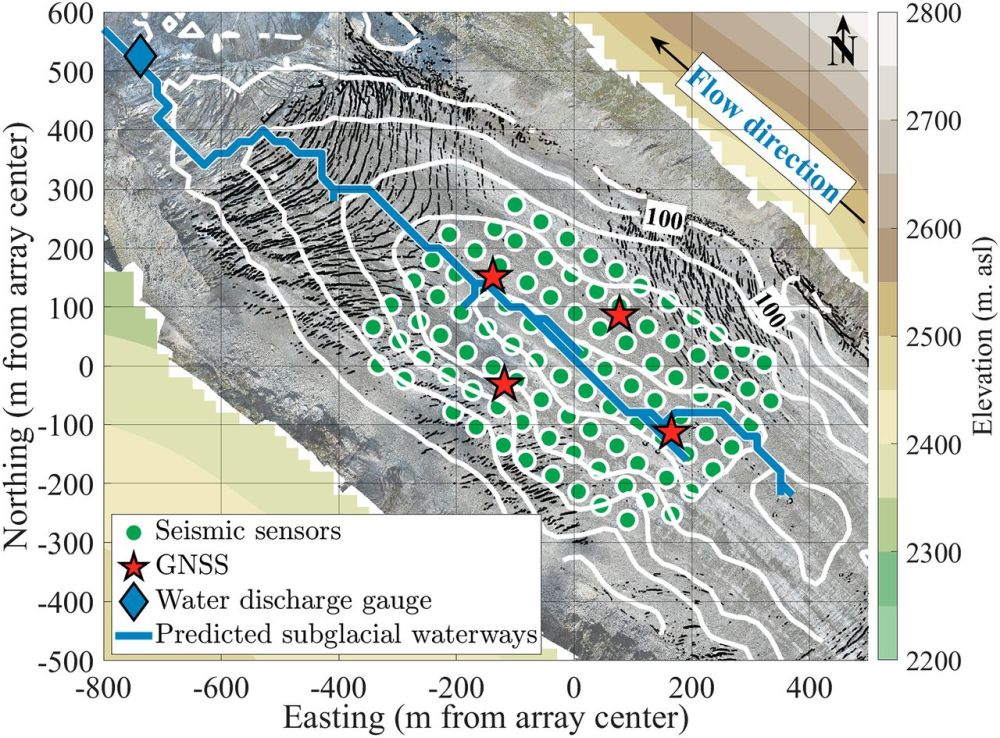
图1 d'Argentière冰川俯视图和本次研究中使用仪器的点位分布(Nanni et al., 2021)。密集地震阵列由98个三分量传感器(绿点)组成,4个全球导航卫星系统点位(红色五角星)测量了观测期间的冰川表面位移,冰川下的水流量(蓝色菱形)则是通过钻孔直接进入冰川底部测量获得。白色线显示的是50米间隔的冰层厚度等高线。蓝线显示了根据水力势能计算预测的冰下水流通道。冰川向西北方向流动(左上)
研究表明,米每秒数量级流速的冰下湍流能够产生可检测的地震噪声,该地震噪声可以用于探测冰川下通道的物理特性(例如水压、通道的几何尺寸)及其空间位置。作者利用了水声学中的匹配场处理技术(Matched-Field Processing,MFP)。该方法中,源、介质和传感器阵列作为三个要素,已知其两者,就可以推导第三者。源在介质中辐射信号,形成一定的场分布;介质则确定了信号的传播形式;传感器阵列用于接收信号,对介质中的信号分布进行时空采样。已知传感器阵列接收信号和介质信息,待求解的是源位置信息,称为匹配场定位;已知传感器阵列接收信号和源位置信息,待求解的是介质信息,称为匹配场反演。本研究中,作者通过29个试验源(图2D,粉色十字叉),利用假设均匀的冰川速度模型,合成所有传感器位置处(图2D绿色圆点)的地震信号作为拷贝数据(Replica Data),与该密集地震阵列上观测到的实际地震信号(Given Data)进行匹配相关,并将相关的能量作为MFP输出。研究中的MFP输出有四个参数,分别是深度Z、坐标(X,Y)和相速度C,通过评估阵列上地震信号相位的相干性强弱来确定噪声源空间坐标的概率分布及相速度,进而估计相关的环境参数(水压、通道几何尺寸等)。MFP输出按特定信号频段计算,其输出值的范围从0到1。MFP输出越接近1,合成阶段的参数选择就能越符合观测数据所对应的真实参数。
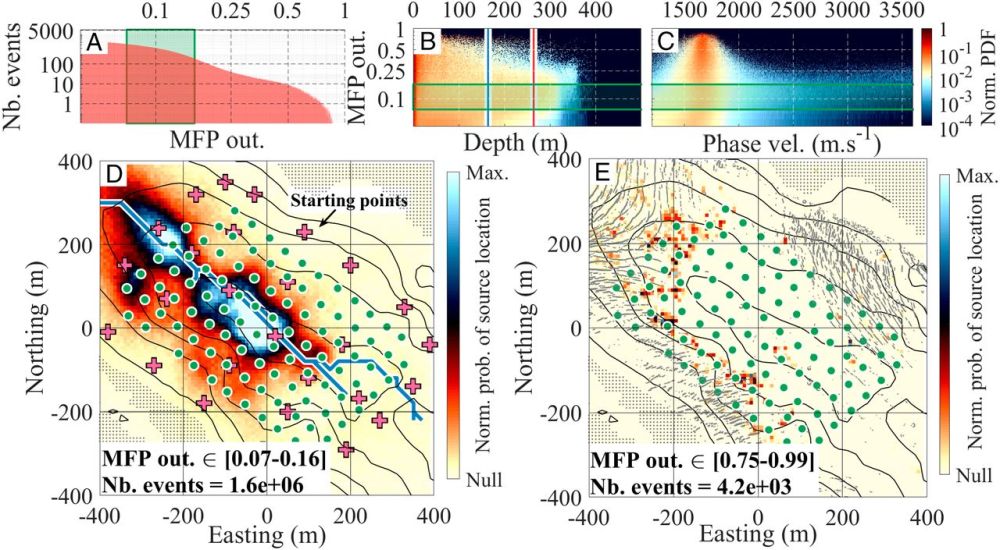
图2 5±2 Hz频率范围对应的MFP输出概率统计及其和参数的关系(Nanni et al., 2021)。(A)MFP输出与每天定位的事件平均数量的关系。绿色阴影区域显示的MFP输出范围为[0.07-0.16],该范围用于研究噪声源的空间分布。(B)MFP输出的归一化概率密度函数(Probability Density Function,PDF)与震源深度的关系。垂直红线表示最大冰层厚度,蓝线表示平均冰层厚度。(C)MFP输出的归一化概率密度函数与相速度的关系。(D和E) MFP输出范围为[0.07-0.16]和[0.75-0.99]的源位置归一化概率的二维平面表示。等高线为间隔50m的冰厚等高线,灰色阴影表示无冰区域,D图中蓝线表示根据水力势能预测的冰下通道。黑点显示裂缝位置,粉色的十字叉表示在匹配场定位算法中使用的29个点位
如图2,作者发现,高相干性(MFP>0.8)的事件主要位于可以观测到裂隙的冰川表面(图2B、图2E),并且传播速度与面波的速度(约1580 m/s,图2C)相符合,表明其对应于冰川裂隙引发的冰川表面震动事件。相反,低相干性(MFP∈[0.05 0.3])的事件主要位于冰川的冰-岩分界面深度处(图2B),速度可高达3600 m/s,与体波一致。这些源的空间分布主要位于沿冰川中心线的两个狭长区域,根据水力势能计算的冰下水道的可能位置,可以将观测到的震源分布解释为冰下水系的几何分布。相比较于探测到湍流的排水系统(包括空洞状系统和通道状系统),冰川底部的许多地区没有震源分布概率,水力连通性较低,具有较高的储水能力。此外,与冰川底部对比,冰川的表面定位到的源相对较少,可能是由于水流少或水流不够湍急。
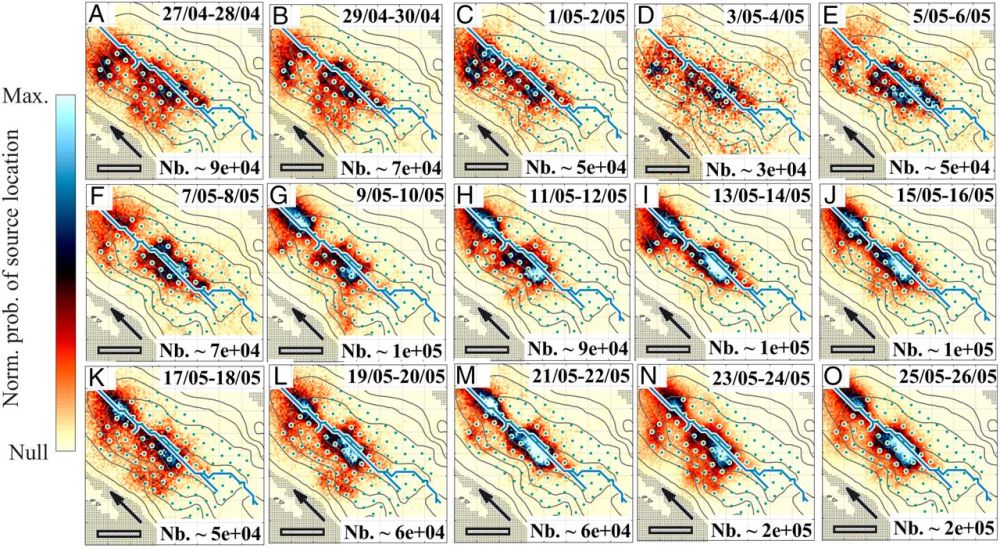
图3 MFP输出对应的冰川下水流噪声源位置分布(Nanni et al., 2021)。在5±2 Hz频率范围和[0.07至0.16]MFP输出范围内获得的震源位置密度的时空演化。每张图都是相邻两日的平均值,Nb.为源的相关数量,黑色箭头表示冰川和冰下水流方向
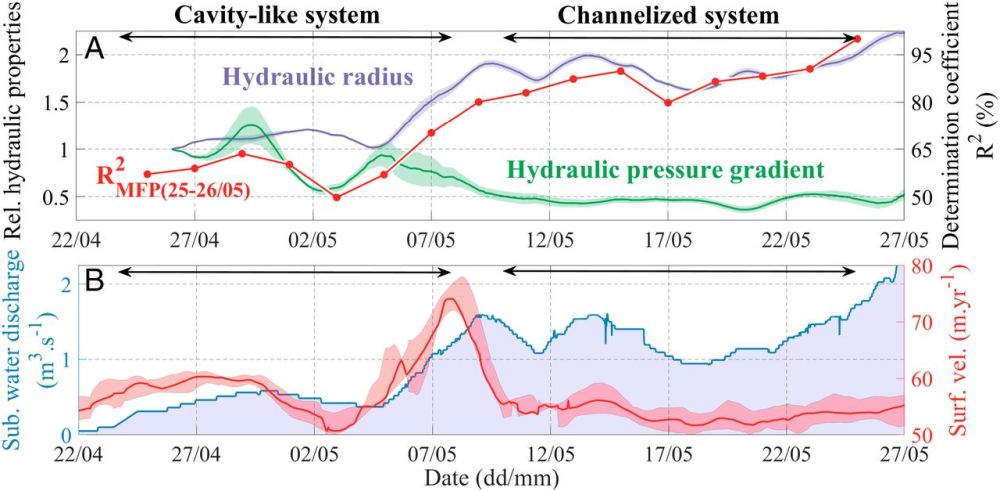
图4 冰下水力特性、地震观测和冰川流动的时间演变(Nanni et al., 2021)。(A)图中显示了98个传感器的平均水力特性:相对于4月26日,绿色阴影包络线为水力梯度的平均绝对偏差(MAD),紫色阴影包络线为水力半径的平均绝对偏差(MAD)。右轴(对应红色线)显示了空间化地震观测数据的时间演化,使用的是图3O中震源位置模板的决定系数R2,这个系数越接近1,排水系统越趋于通道化。(B) 蓝色阴影表示冰下水量,红线表示在最小/最大包络线的四个冰上GNSS点位(红线)平均的冰川表面运动速度
研究中关注的水力特性主要有两方面。其中,水力半径(Hydraulic radius)是输水断面的过流面积与和水体接触的输水通道边长(湿周)之比,其值越大,阻力越小。水力梯度(Hydraulic pressure gradient)是沿着水流方向,水压变化率和流经长度的比值,其值越大,水流经单位距离克服摩擦力所损失的机械能越大。如图4,5月10日前,水力半径小,指示了较低的排水效率。同时,冰川表面流速明显增加(速度增加了约50%),这是由于冰川底部的水在空洞状系统中流动,增加了底水压力,进而导致冰川底部滑动增强,这与噪声源分析的结果相吻合。5月10日后,水力梯度略微减小,而水力半径增加了一倍,这表明增加的排水效率降低了底水压力,导致冰川滑移略微减速。研究表明,高效的、通道式的排水系统可以降低底水压力,进而减缓冰川滑移。密集地震阵列分析不仅可以确定从空洞状排水系统到通道状排水系统转变发生的时间和地点,而且可以识别空洞和通道之间具有高水力连通性的区域,进而可以获得哪些冰川的哪些区域潜在活动性高,对融水的输入速率比较敏感。
本研究中,作者利用密集地震阵列结合创新的震源定位技术提供了冰下排水系统的高分辨率观测,有效地监控了冰下水流何时、何地、以及在何种条件下促进或阻碍冰川滑动,有助于冰川学界判断冰盖或高山冰川对气候变暖、极端融水、降雨事件导致的融水增加的敏感性。此外,该方法也适用于其他环境中产生类似空间传播地震噪声,例如火山上的熔岩流、断裂带中的微震和河流中的沉积物运输等。
【致谢:感谢中国科学院西北生态环境资源研究院蒲焘副研究员提出的宝贵修改意见。】
主要参考文献
Nanni U, Gimbert F, Roux P, et al. Observing the subglacial hydrology network and its dynamics with a dense seismic array[J]. Proceedings of the National Academy of Sciences, 2021, 118(28): e2023757118.(原文链接)
Lliboutry L. Modifications to the theory of intraglacial waterways for the case of subglacial ones[J]. Journal of Glaciology, 1983, 29(102): 216-226.
Rothlisberger H. Water Pressure in Intra- and Subglacial Channels[J]. Journal of Glaciology, 1972, 11(62): 177-203.
Gimbert F, Nanni U, Roux P, et al. The RESOLVE project: A multi-physics experiment with a temporary dense seismic array on the Argentière Glacier, French Alps[J]. Seismological Research Letters, 2020, 92 (2A): 1185–1201.
(撰稿:芦一帆,田小波/岩石圈室)